Non-Linear Curve Fits
INTRODUCTION
Frequently we have a table of values as a function of a single variable which may have measurement noise or other inaccuracies. These would be of the form
![]()
What we want to do then is to find the “m” parameters “λ” of some function f(x; λ) which is “non-linear” in the parameters and provides the best fit to the tabulated data.
NON-LINEAR FITS
Given some function, then at each data point we can write
![]()
for the “m” parameters 
and where “![]() ” represents the uncertainty
or measurement error as a consequence of an imperfect initial estimate of the
parameters. We can then approximate the errors as a linear combination of corrections
to our parameter set as
” represents the uncertainty
or measurement error as a consequence of an imperfect initial estimate of the
parameters. We can then approximate the errors as a linear combination of corrections
to our parameter set as

where  which could be used
to iteratively update the original set as
which could be used
to iteratively update the original set as
![]()
Writing out the entire matrix we get
or more concisely
![]()
But this is an over determined set of equations and not in
form allowing for a unique determination of the parameter corrections, ![]() . So we multiply
each side by the transpose of the matrix “A” which switches rows and columns as
. So we multiply
each side by the transpose of the matrix “A” which switches rows and columns as
So that

where

and for each element
And also by recalling
![]()
then
or finally
![]()
which allows for a unique solution for ![]() values.
values.
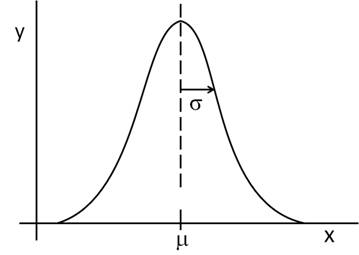
GAUSSIAN FUNCTION
The well known Gaussian distribution (also called the “Normal” distribution or Bell curve) has the general functional form
![]()
where the three parameters are given by
In this parameter set, A is area under the curve of G(x). The
arithmetic average or mean is ![]() . And the last parameter
σ is the standard distribution. These are further described in the Appendix:
Gaussian Parameters.
. And the last parameter
σ is the standard distribution. These are further described in the Appendix:
Gaussian Parameters.
We can write the derivatives of the Gaussian with respect to its three parameters as follows
![]()
![]()
![]()
The iterative corrections to the initial guess for the three parameters can be expressed in the equation
![]()
or in detail, this expands to the following

For the measurements of
![]()
then the individual matrix coefficients are
And defining
![]()
then the matrix elements are
We could solve the matrix equation using Gauss-Jordan but for only three parameters it is easier to write the solutions directly as
![]()
![]()
![]()
![]()
![]()
And this allows us to iteratively update the initial guesses for the parameters
APPENDIX: GAUSSIAN PARAMETERS
For a random variable, X, perhaps with a Gaussian probability distribution, the results of “n” independent measurements can be represented as
![]()
The arithmetic average or mean of this series of “n” values is simply given by

and the variance (or square of the standard distribution) for a large number of “n” trials can be written
These equations are exact and work well for a small number of samples. But as the number of samples increase, it is easier to create a histogram.
Basically the data is grouped into a set of “m” bins where “yj” represents the number of values which lie within some small range, “Δx”, around a midpoint of “xj”. Each small range represents a separate bin and can be drawn as
As before the expression for the mean is

and the variance can be written as
As the number of discrete bins increases and the width “Δx” of each gets smaller, then the bins come to resemble a continuous curve as follows:
For a continuous curve the area under the Gaussian is given by
![]()
The mean value can then be written as
![]()
And the variance is given by
![]()
APPENDIX: INITIAL ESTIMATE
For a discrete set of data points
![]()
then if we first define

then the arithmetic average or mean value of the distribution is given by
and the variance or square of the standard deviation is given by

But since we are linear in A, we can write
![]()
where
![]()
then the total error associated with an initial guess for A is
and we can minimize A in a least squares sense by setting the derivative to zero
or